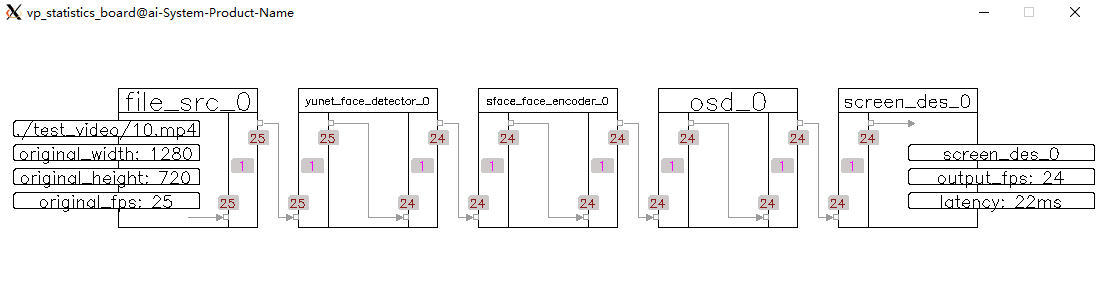
## 1-1-1_sample ##
1 video input, 1 infer task, and 1 output.
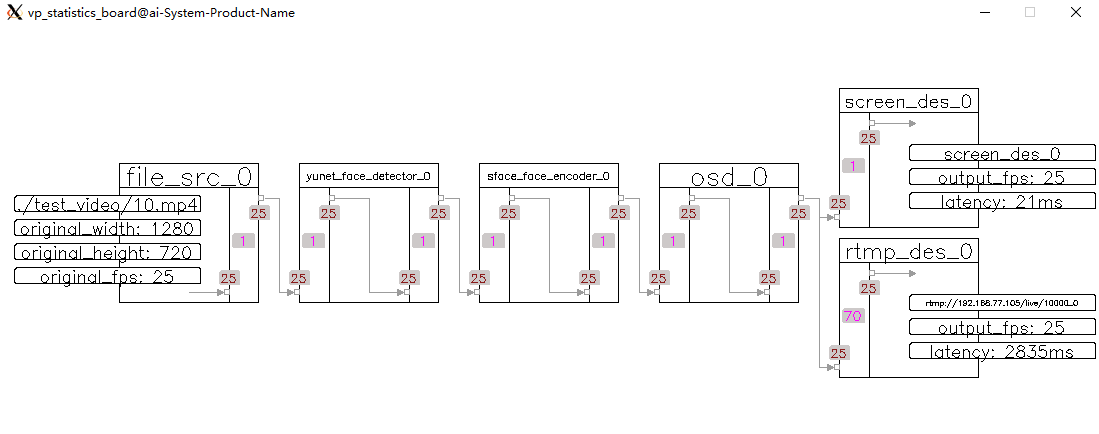
## 1-1-N_sample ##
1 video input, 1 infer task, and 2 outputs.
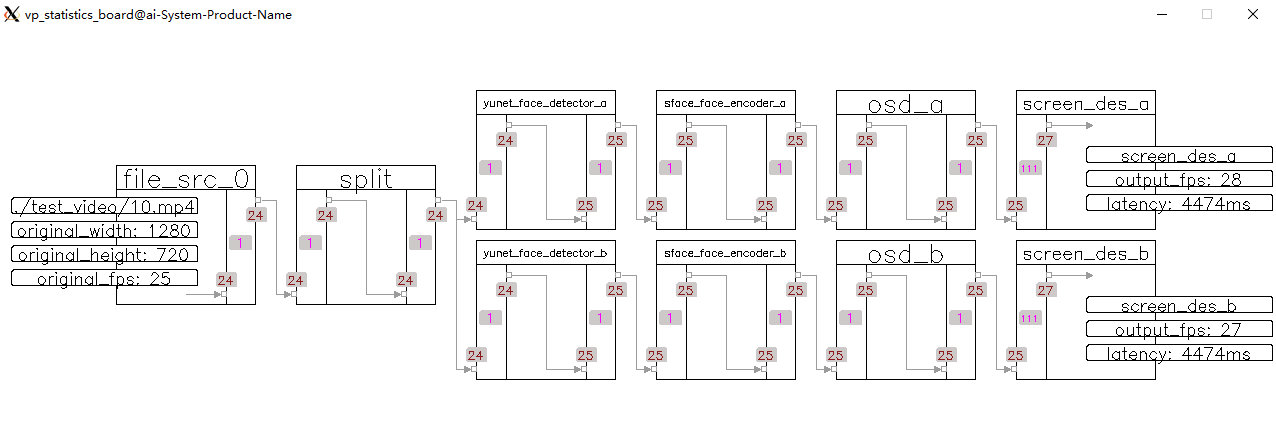
## 1-N-N_sample ##
1 video input and then split into 2 branches for different infer tasks, then 2 total outputs.
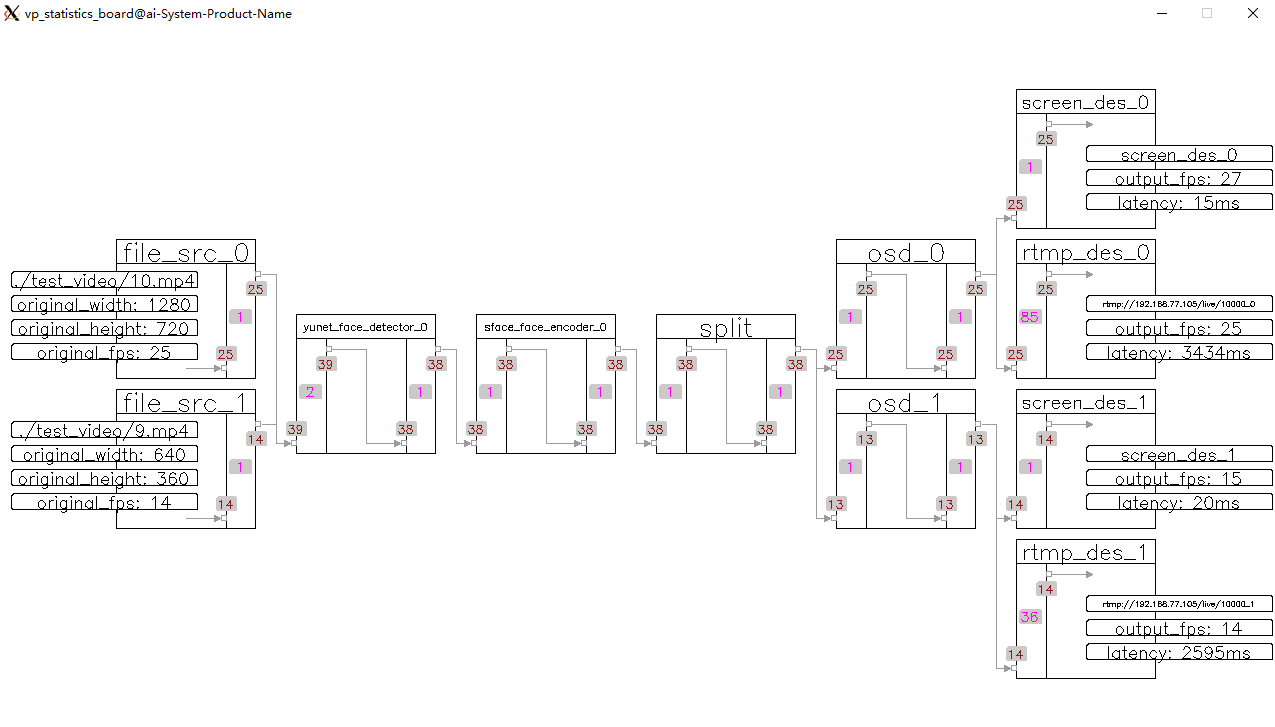
## N-1-N_sample ##
2 video input and merge into 1 branch automatically for 1 infer task, then resume to 2 branches for outputs again.
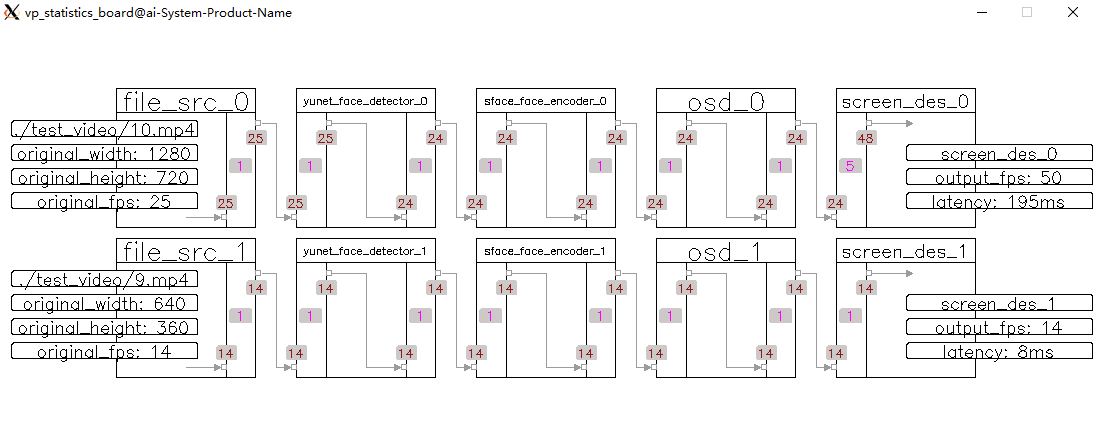
## N-N_sample ##
multi pipe exist separately and each pipe is 1-1-1 (can be any structure like 1-1-N, 1-N-N)
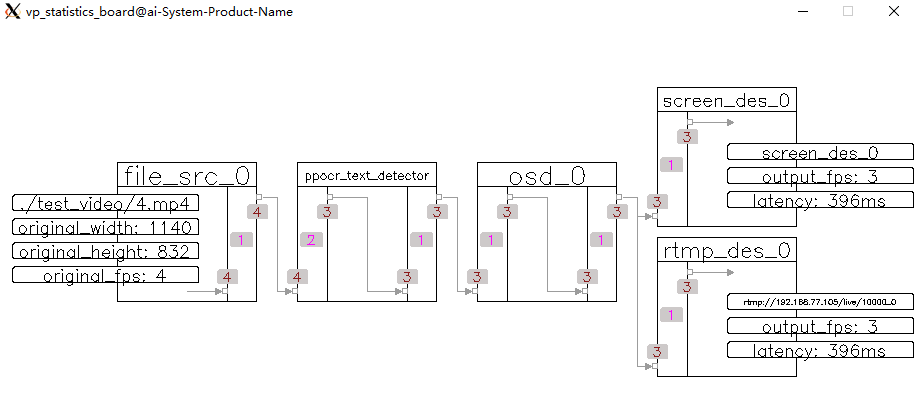
## paddle_infer_sample ##
ocr based on paddle (install paddle_inference first!), 1 video input and 2 outputs (screen, rtmp)
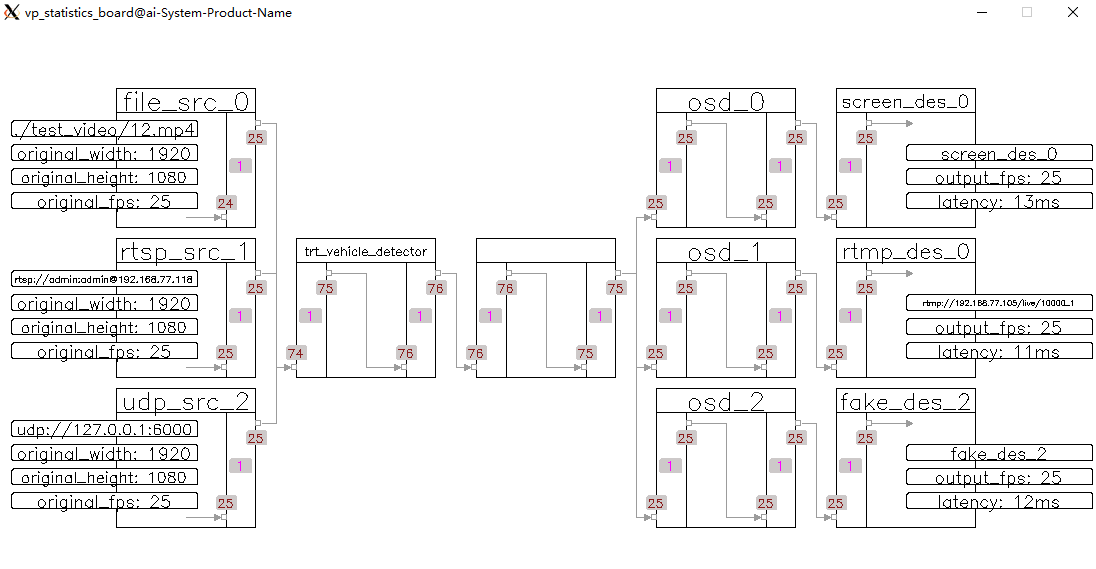
## src_des_sample ##
show how src nodes and des nodes work.
3 (file, rtsp, udp) input and merge into 1 infer task, then resume to 3 branches for outputs (screen, rtmp, fake)
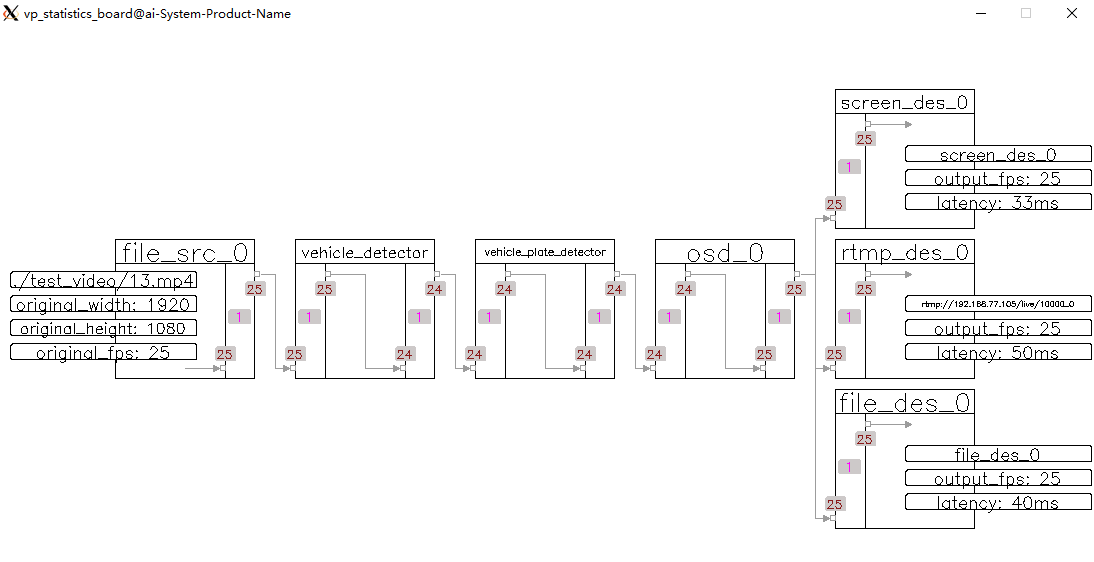
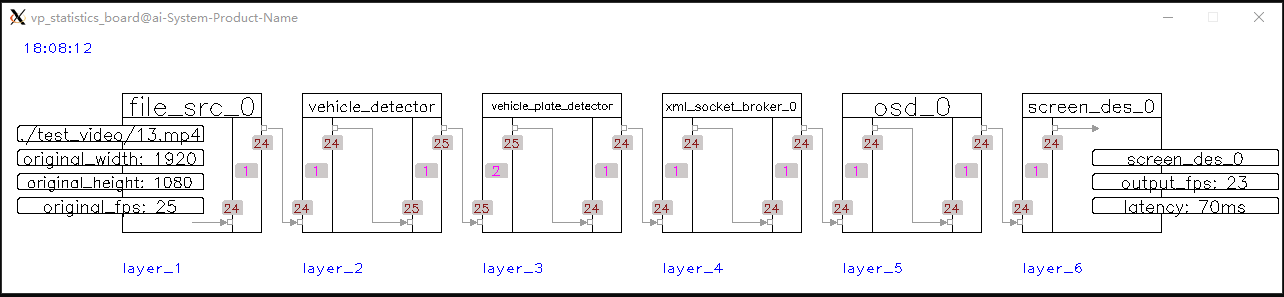
## trt_infer_sample ##
vehicle and plate detector based on tensorrt (install tensorrt first!), 1 video input and 3 outputs (screen, file, rtmp)
## vp_logger_sample ##
show how `vp_logger` works.
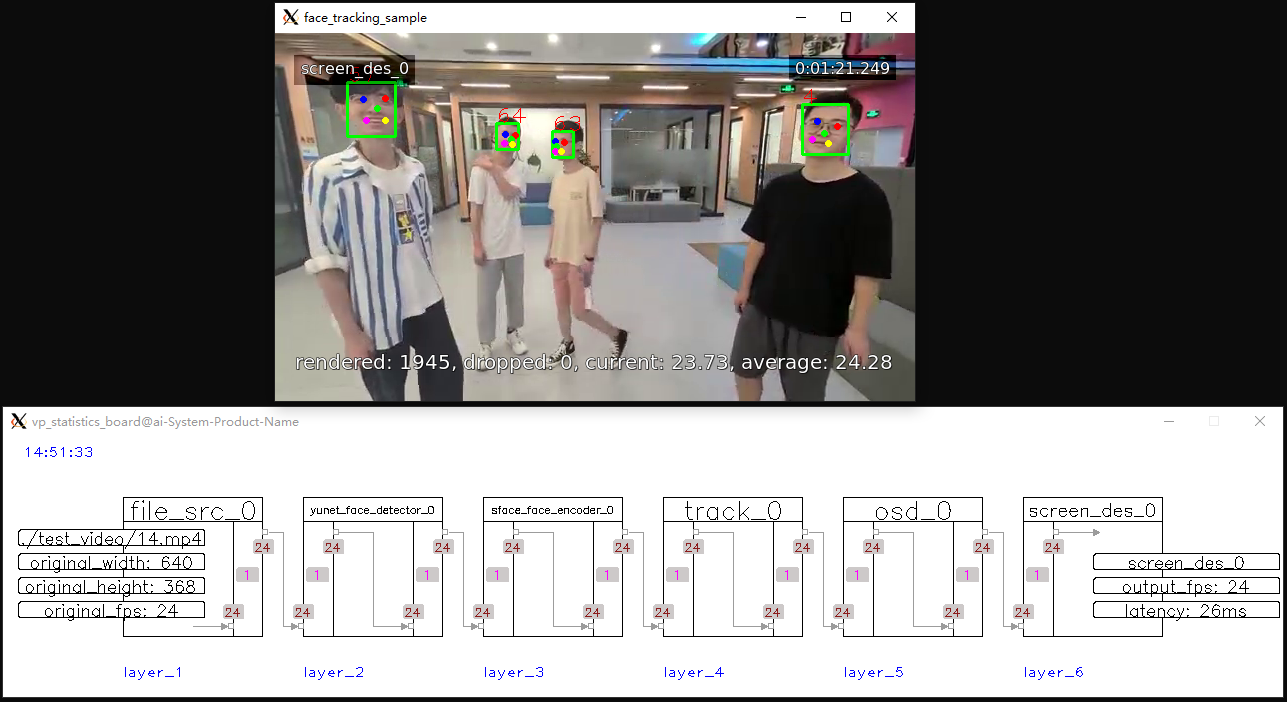
## face_tracking_sample ##
tracking for multi faces.
## vehicle_tracking_sample ##
tracking for multi vehicles.

## interaction_with_pipe_sample ##
show how to interact with pipe, such as start/stop channel by calling api.
## record_sample ##
show how `vp_record_node` works.
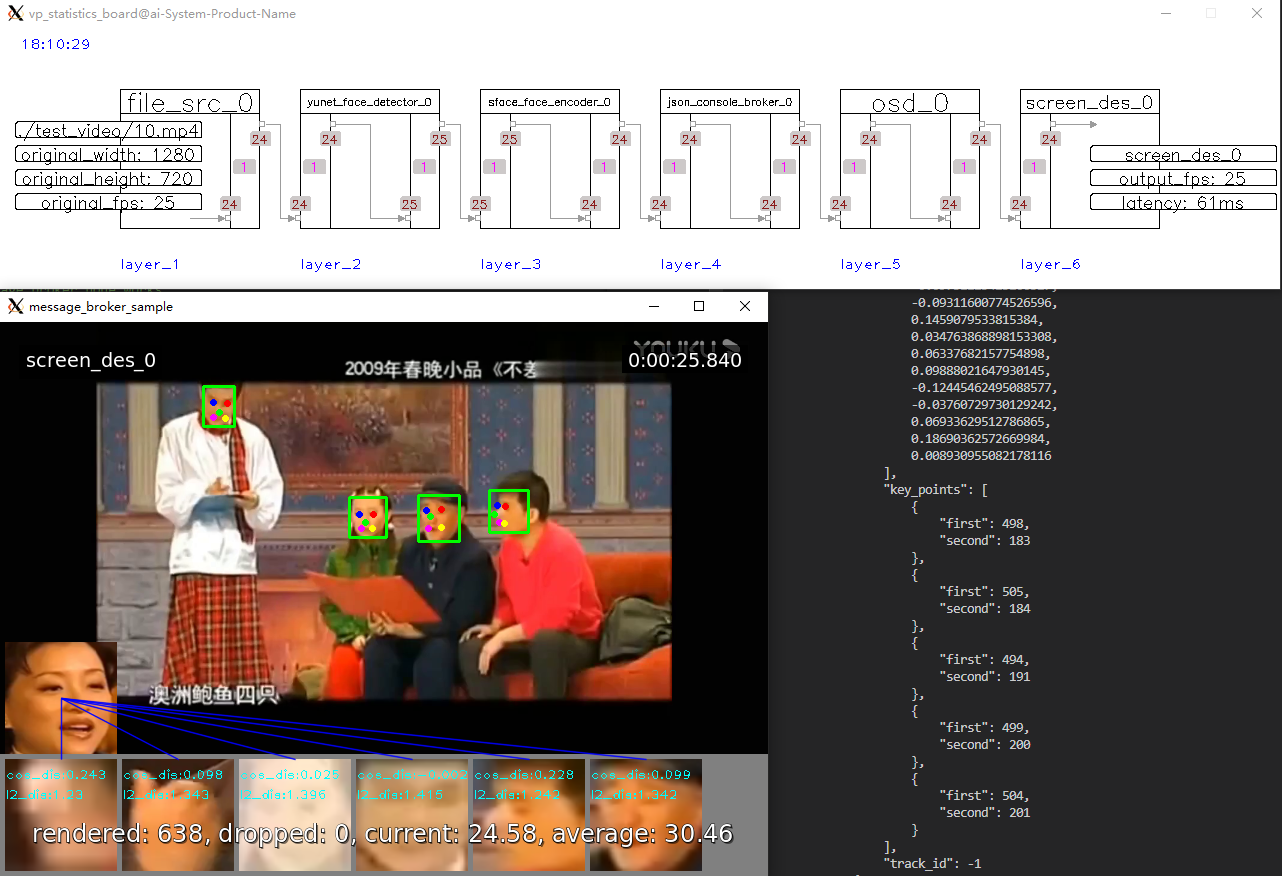
## message_broker_sample & message_broker_sample2 ##
show how message broker nodes work.
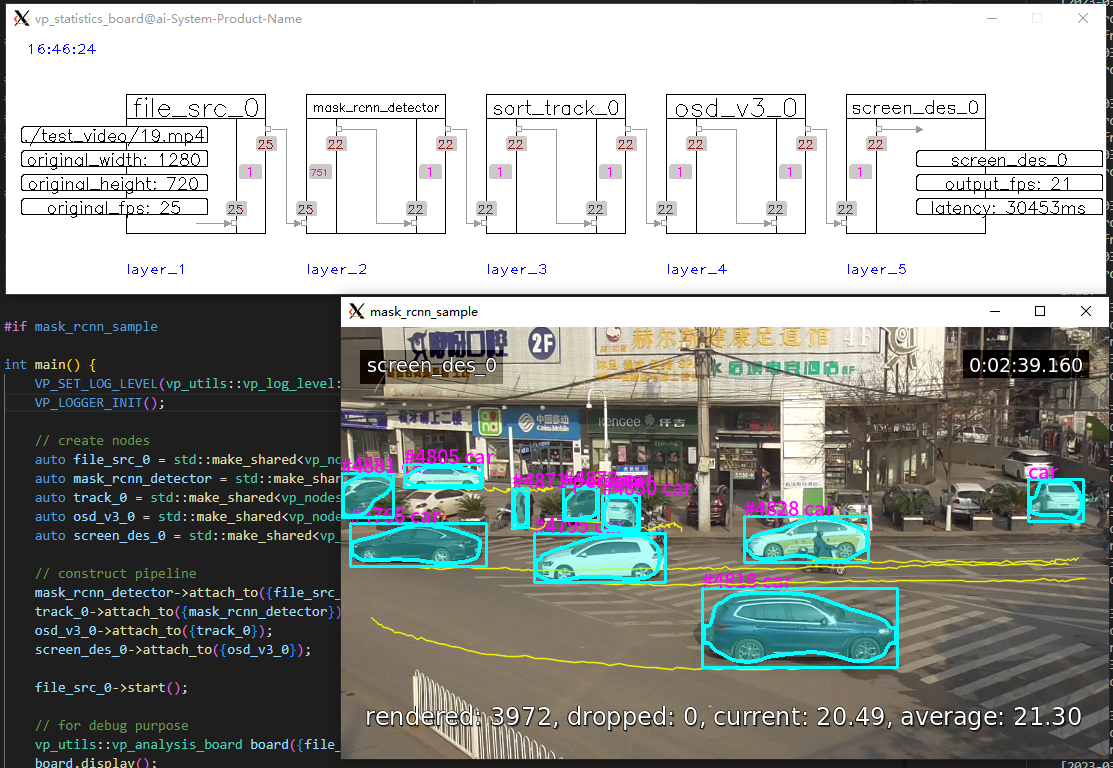
## mask_rcnn_sample ##
show image segmentation by mask-rcnn.
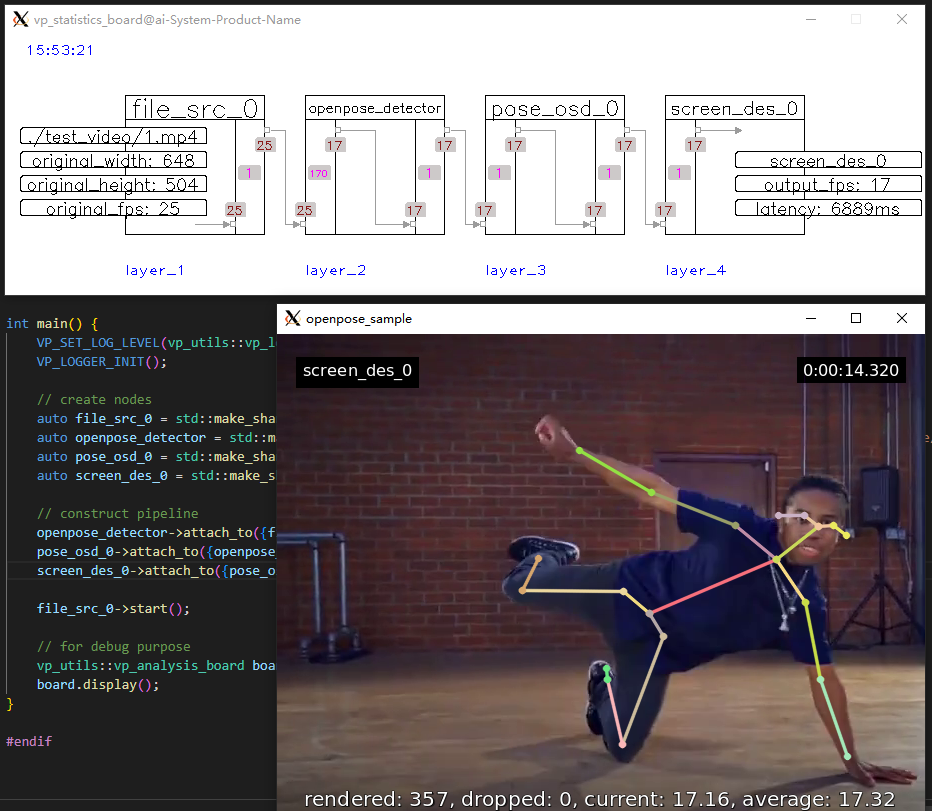
## openpose_sample ##
show pose estimation by openpose network.
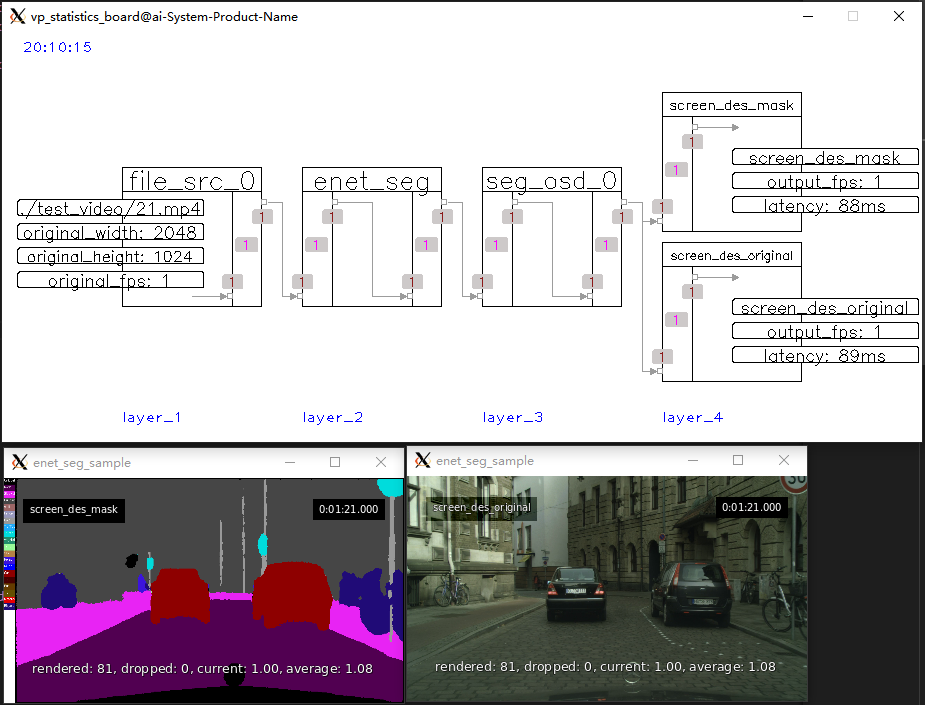
## enet_seg_sample ##
show semantic segmentation by enet network.
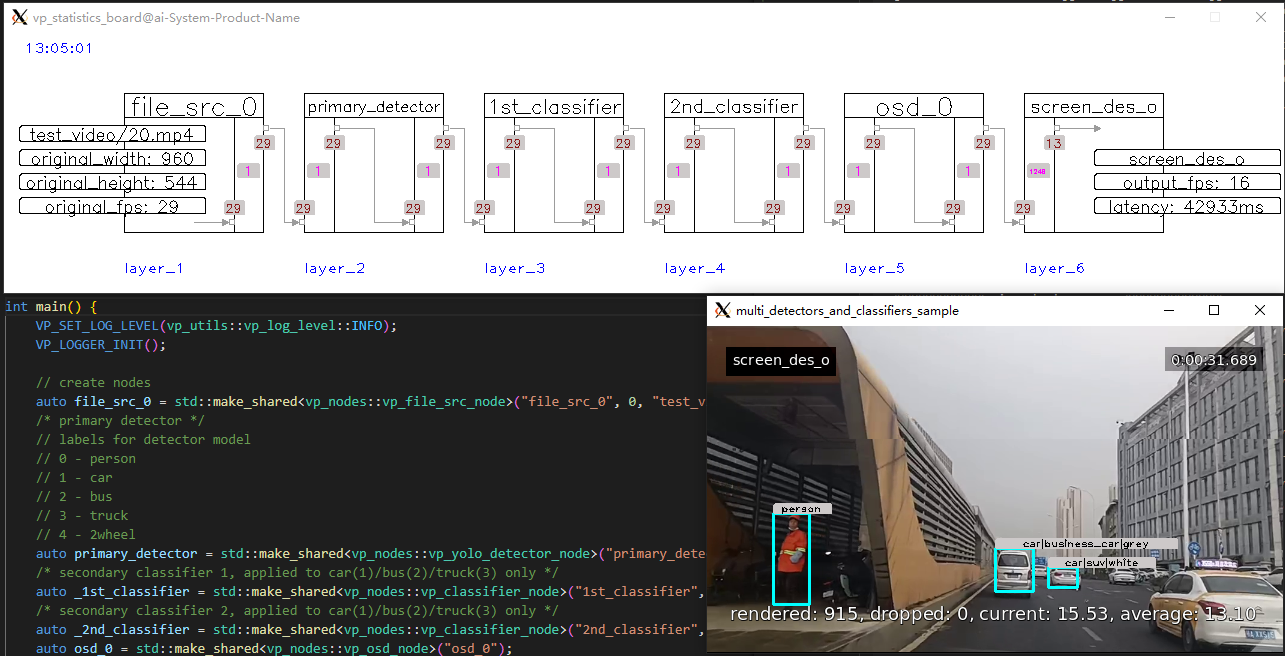
## multi_detectors_and_classifiers_sample ##
show multi infer node work together.
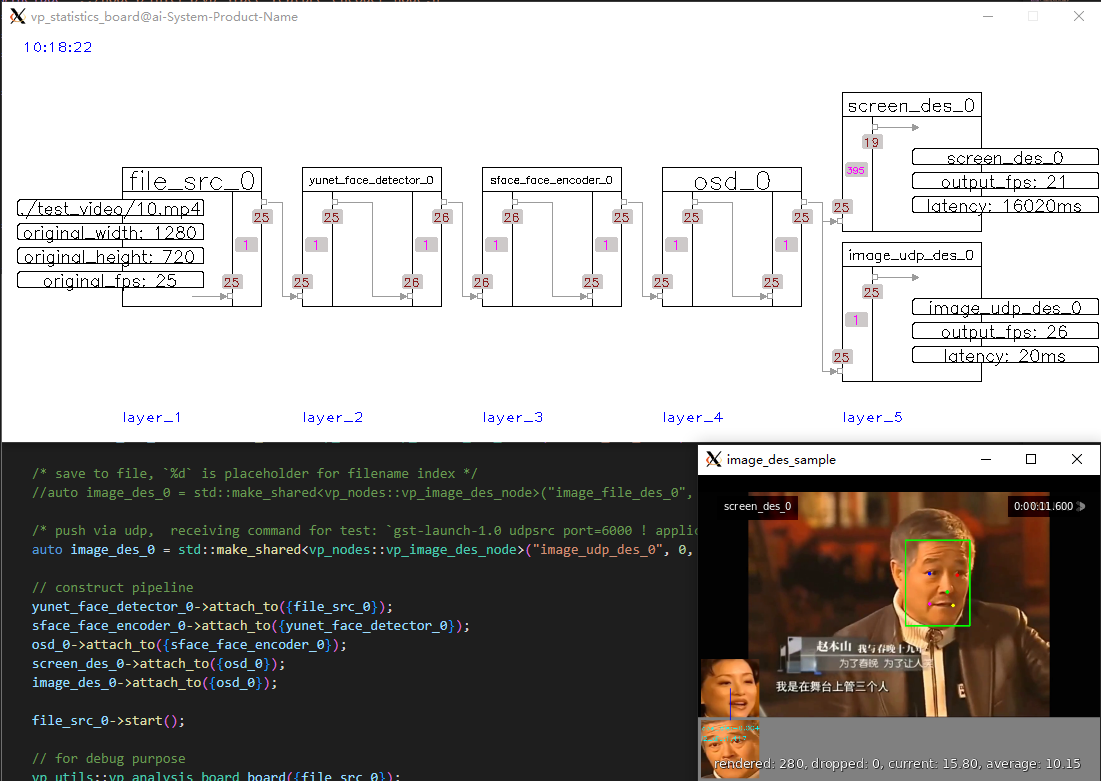
## image_des_sample ##
show save/push image to local file or remote via udp.
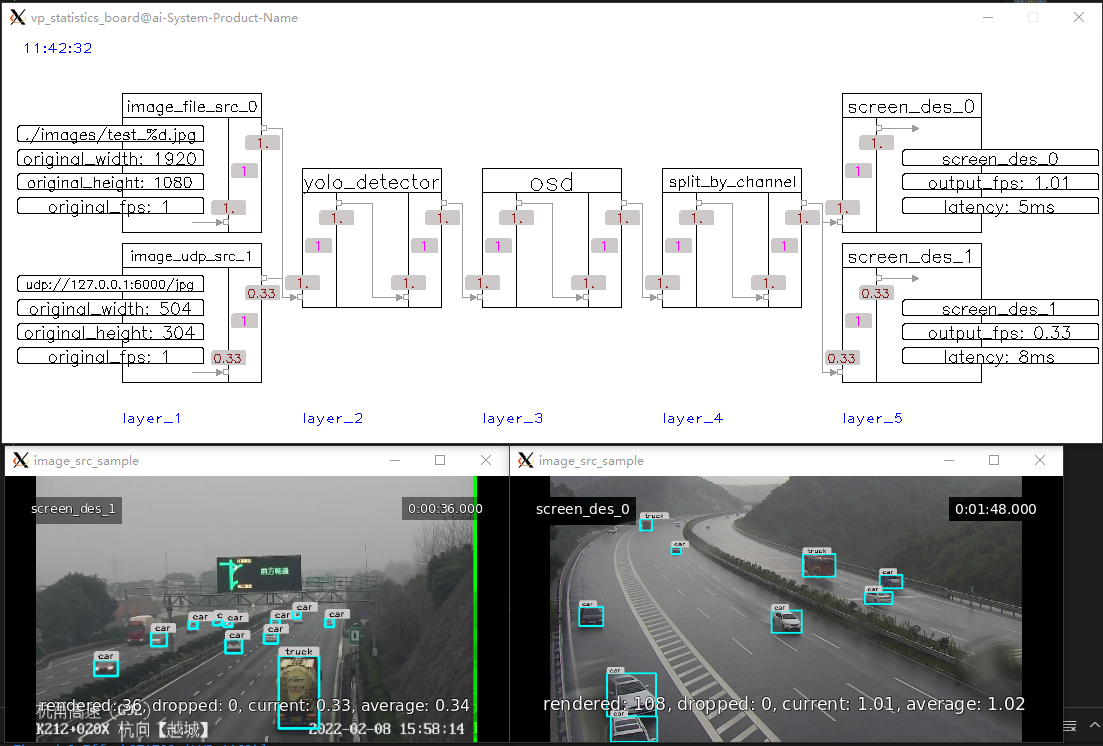
## image_src_sample ##
show read/receive image from local file or remote via udp.
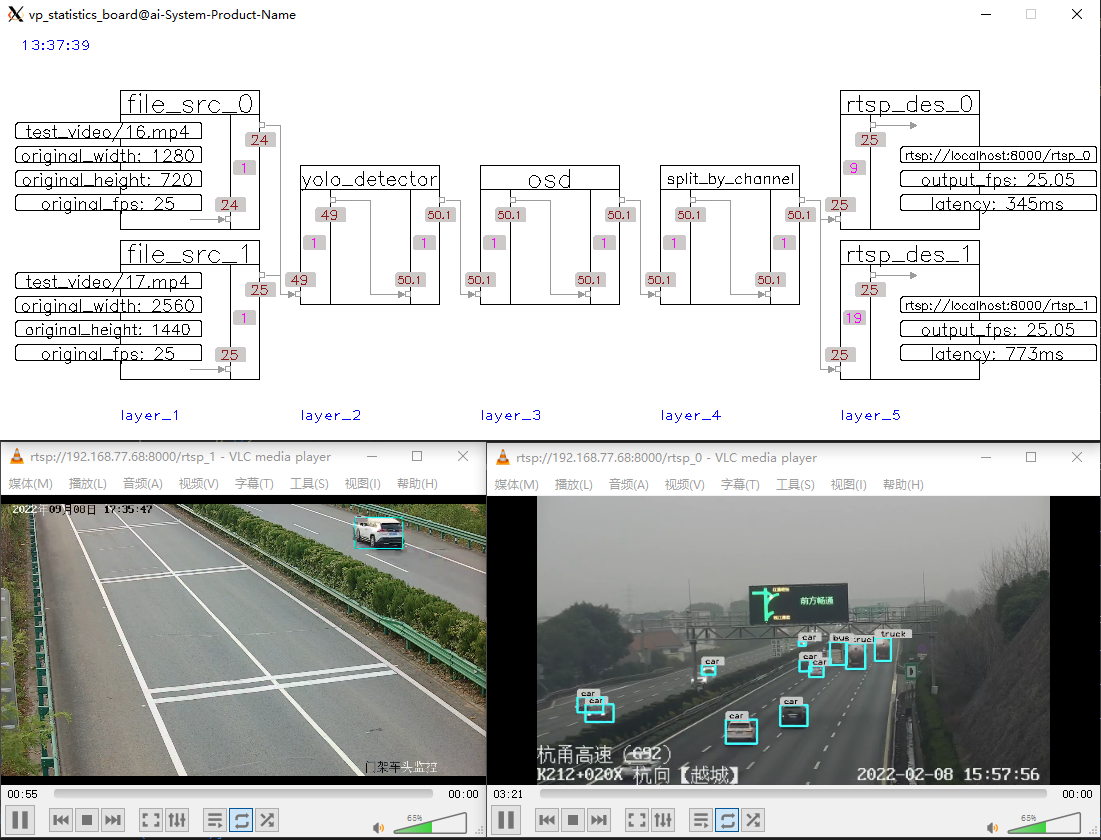
## rtsp_des_sample ##
show push video stream via rtsp, no rtsp server needed, you can visit it directly.
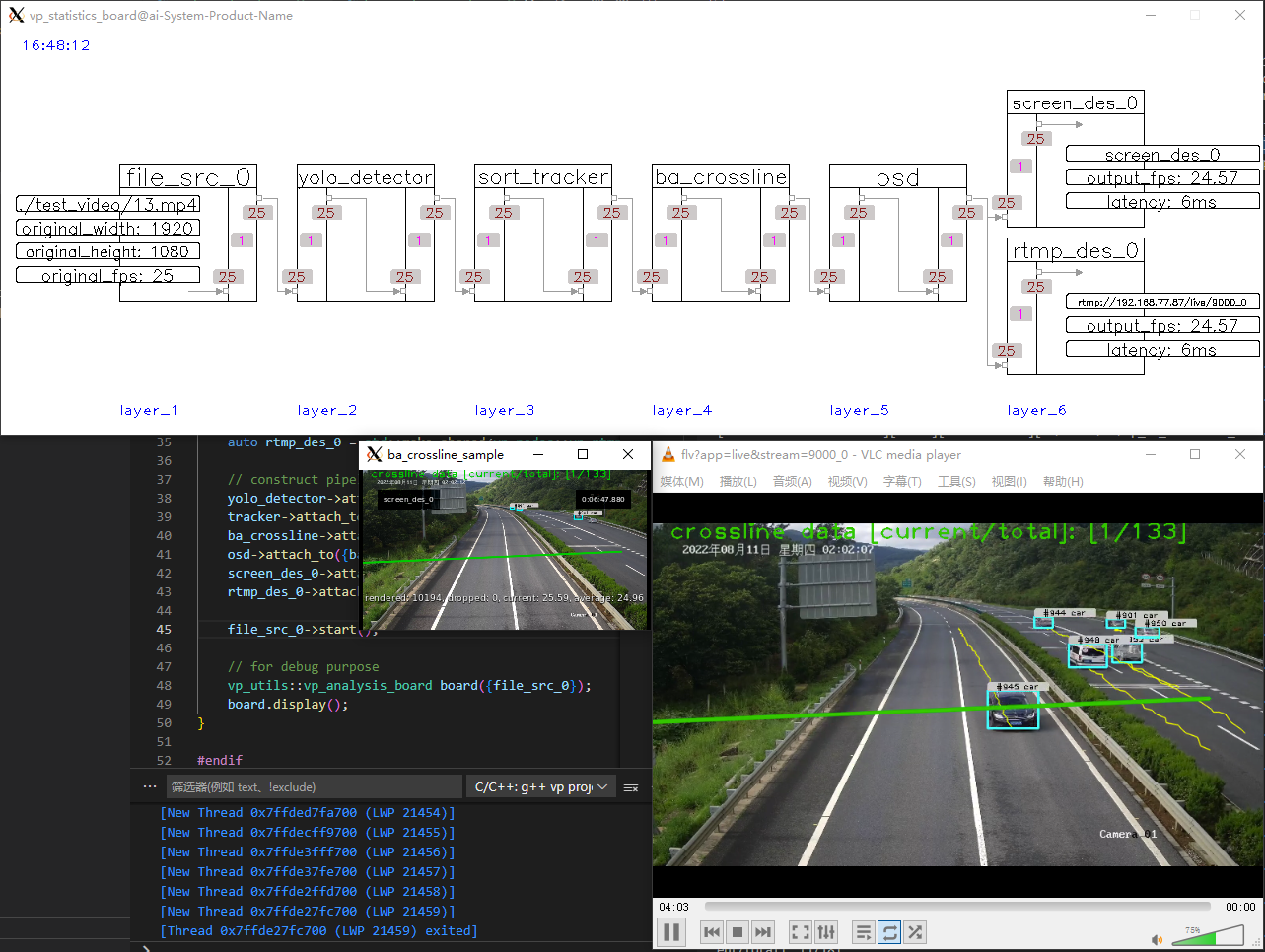
## ba_crossline_sample ##
count for vehicle based on tracking, the simplest one of behaviour analysis.
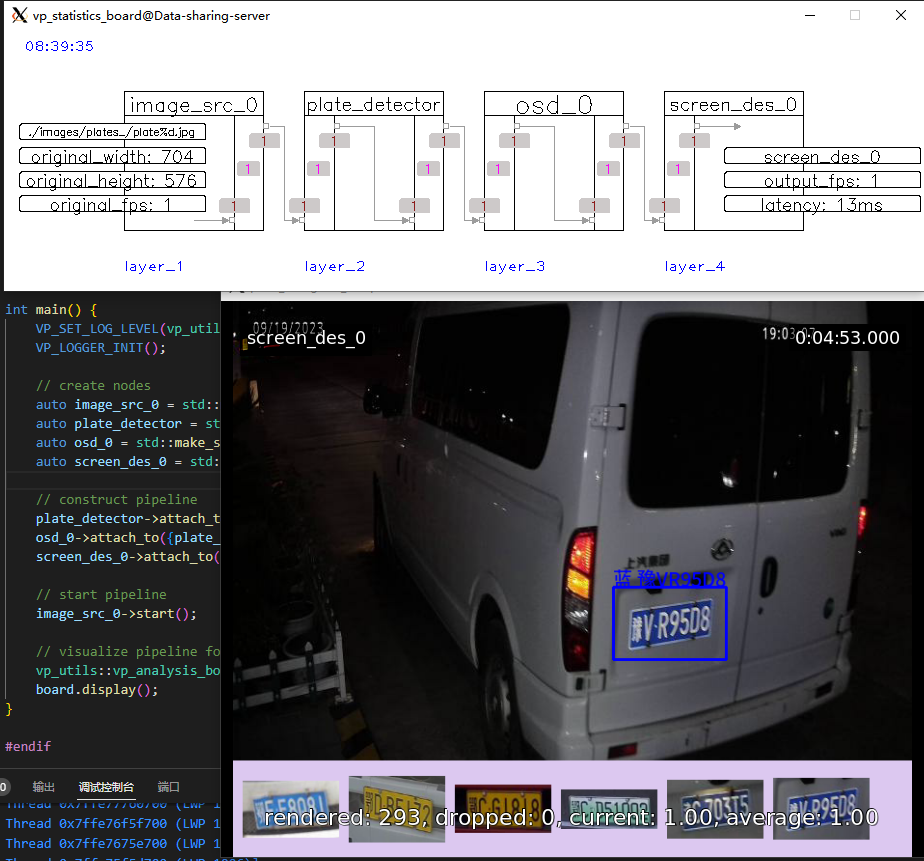
## plate_recognize_sample ##
vehicle plate detect and recognize on the whole frame (no need to detect vechile first)
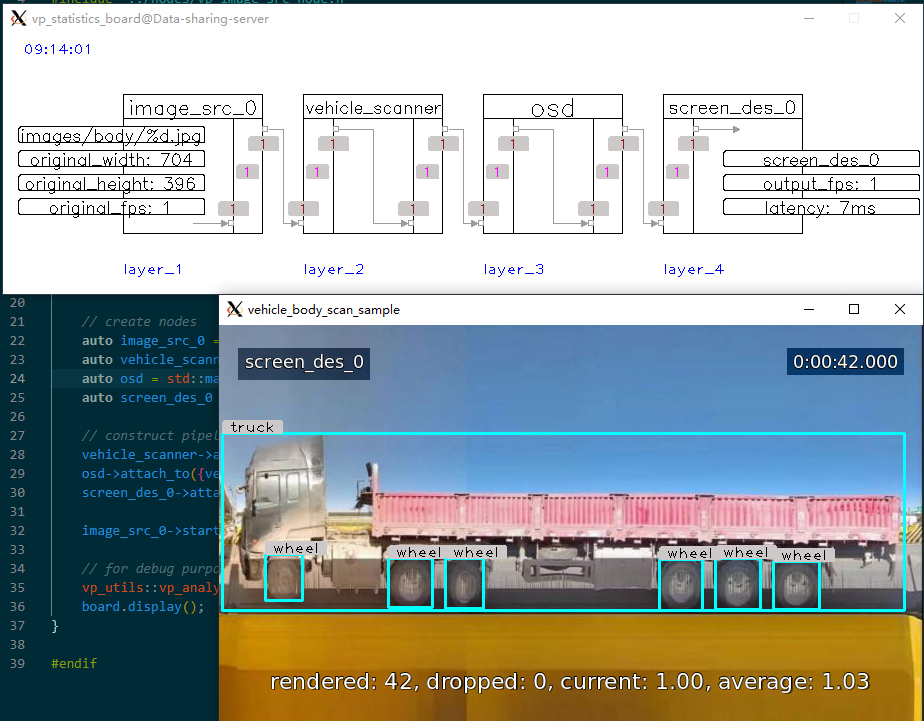
## vehicle_body_scan_sample ##
detect parts of vehicle based on side view of body
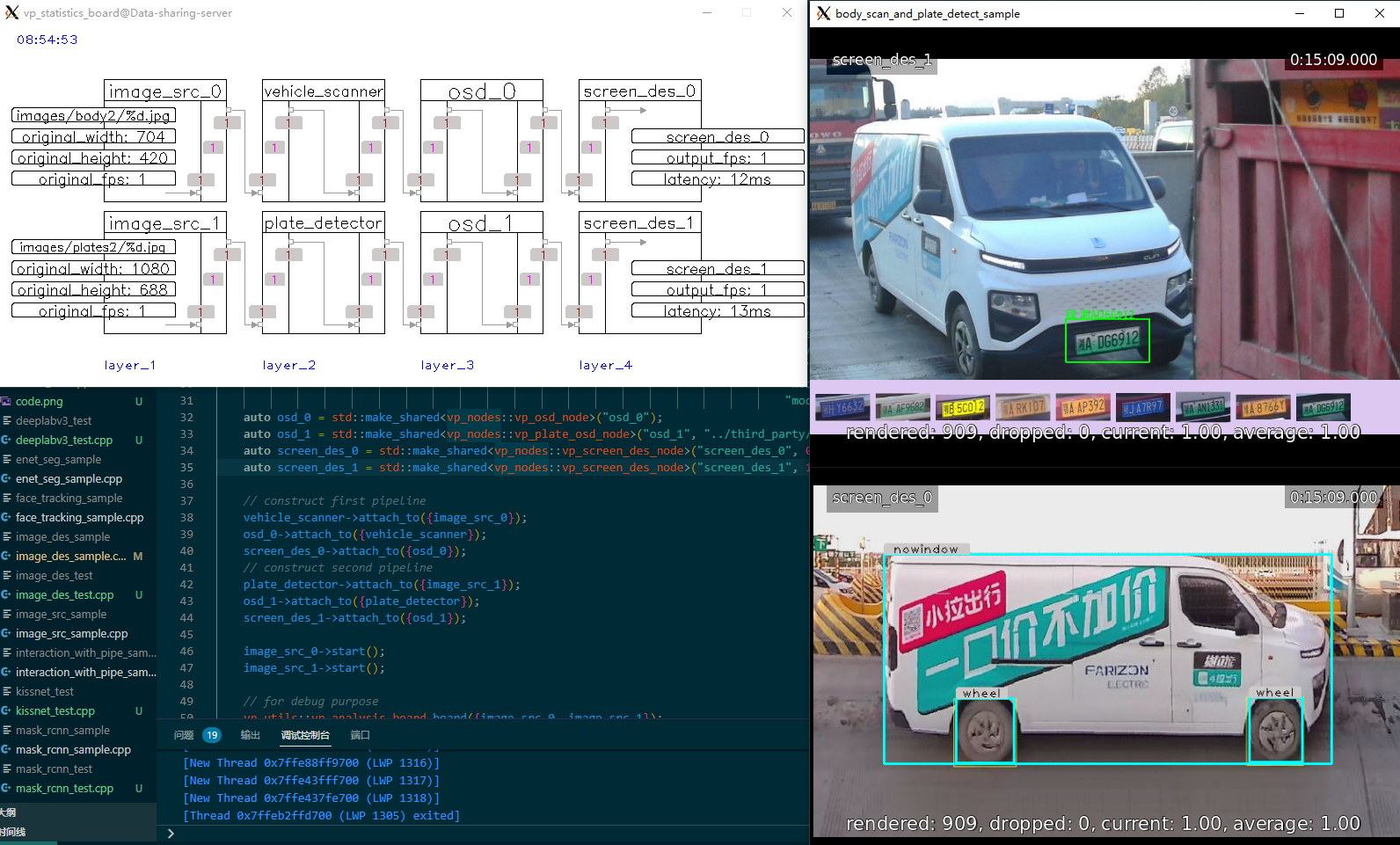
## body_scan_and_plate_detect_sample ##
2 channels to detect parts of vehicle and detect vehicle plate, you can do something like data fusion later
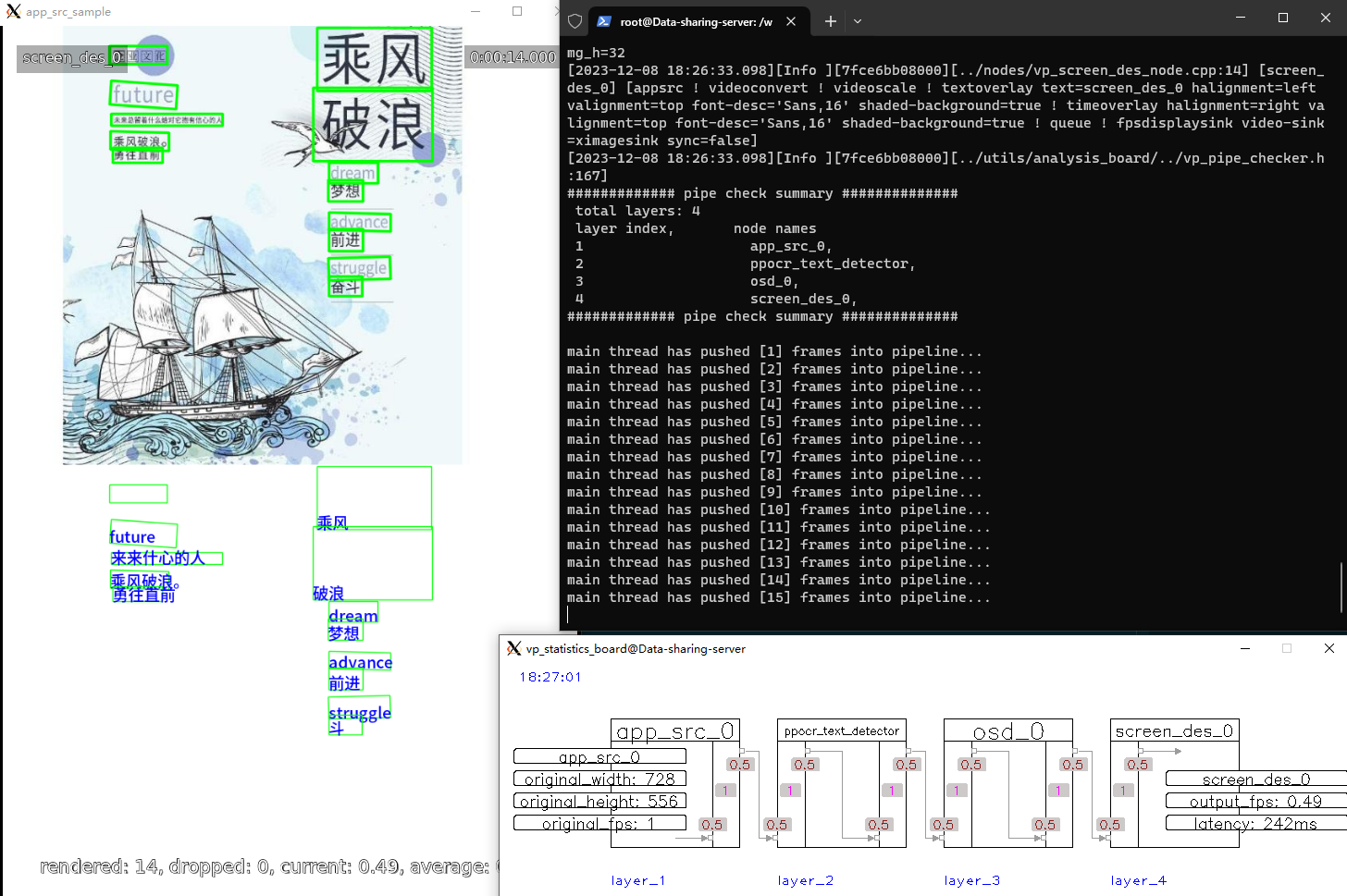
## app_src_sample ##
send data to pipeline from host coda using app_src_node
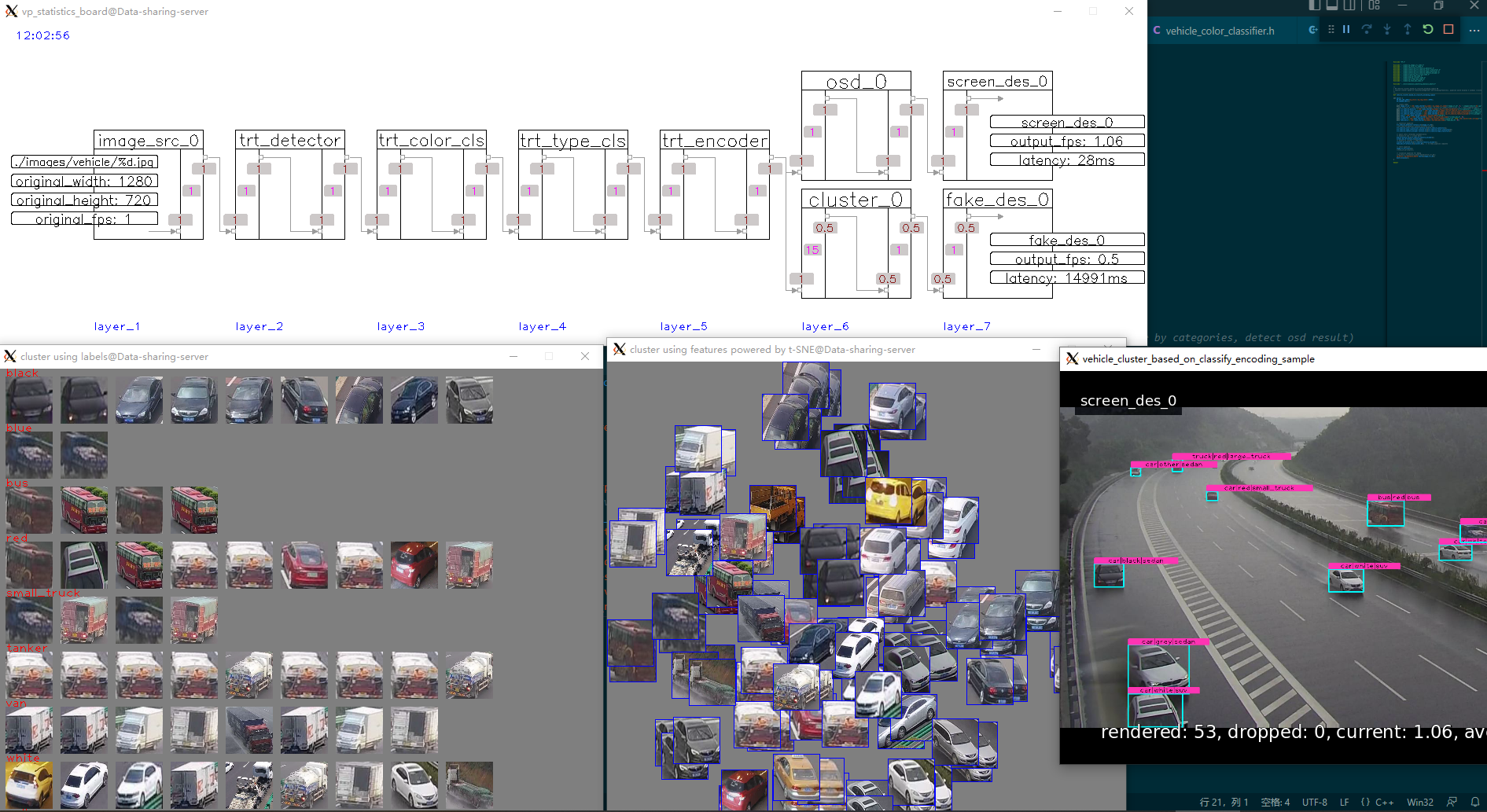
## vehicle_cluster_based_on_classify_encoding_sample ##
vehicle cluster based on labels(classify) and encoding(feature extract), pipeline would display 3 windows (cluster by t-SNE, cluster by labels, detect result)
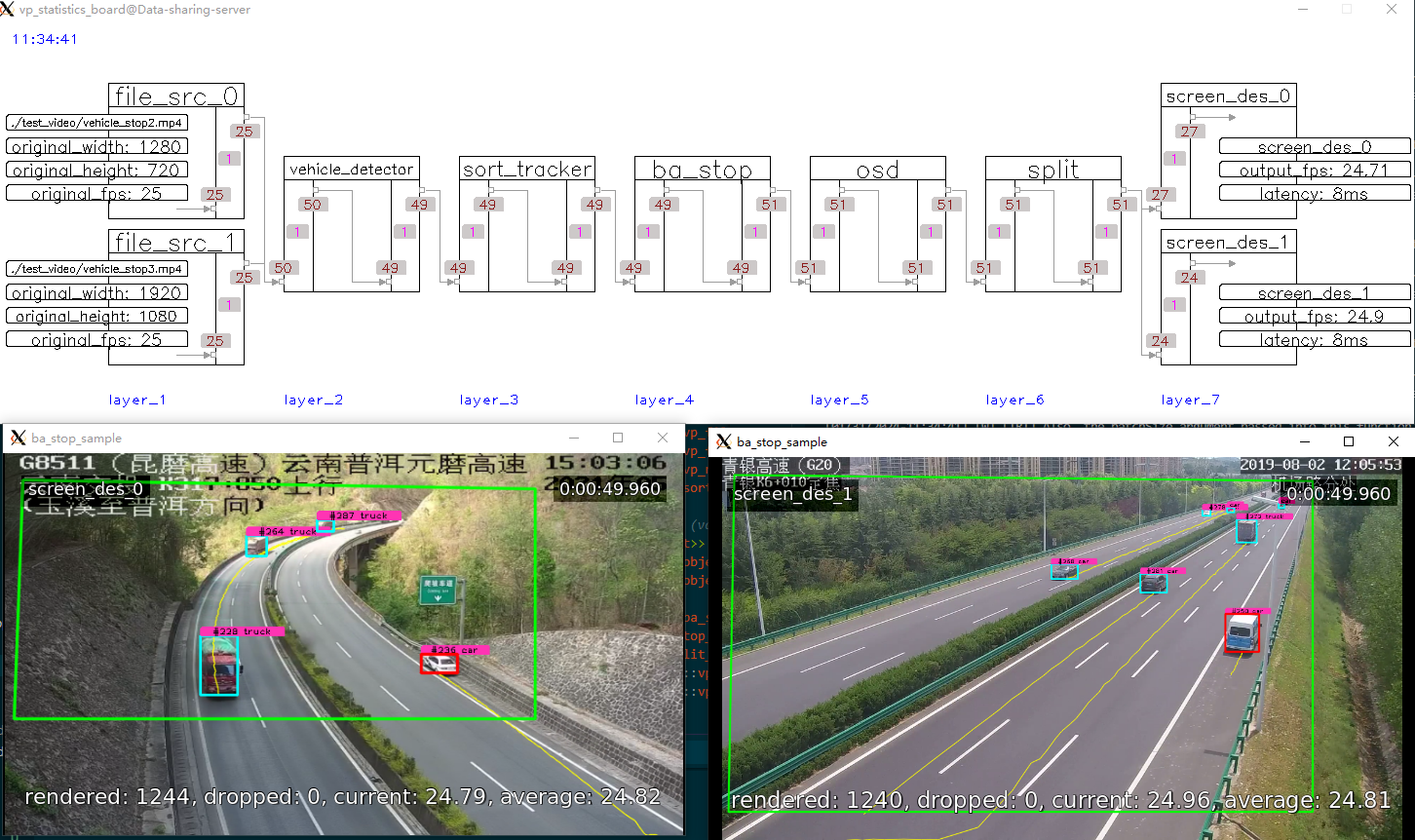
## ba_stop_sample ##
vehicle stop behaviour analysis
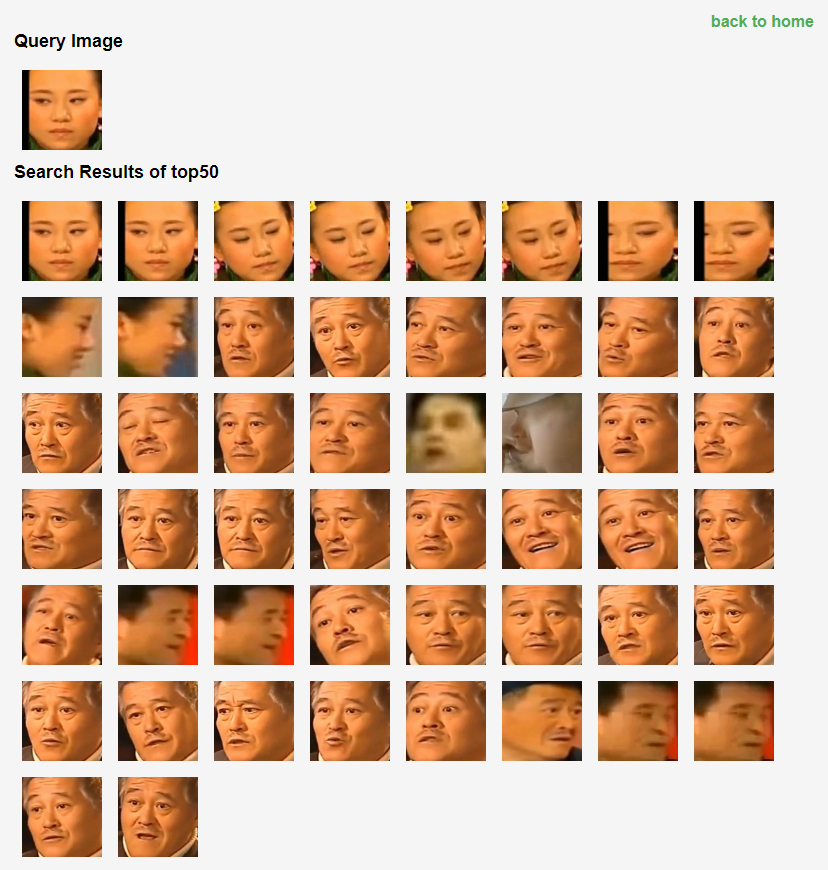
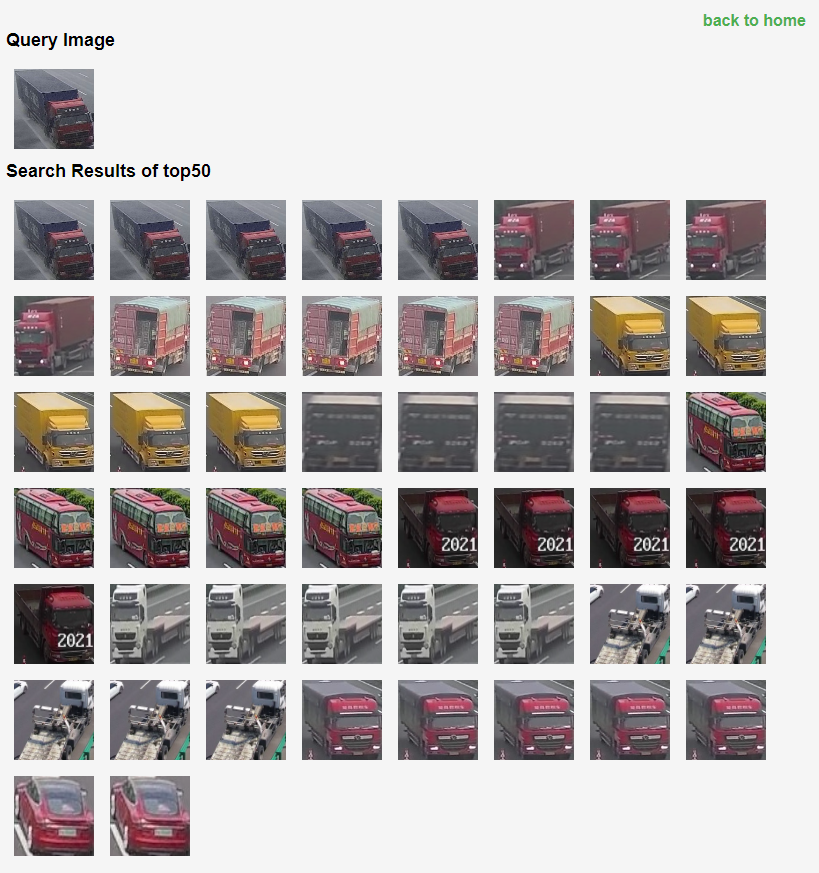
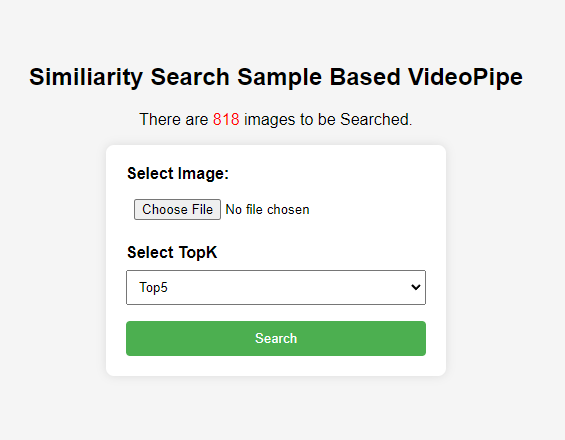
## similiarity search ##
flask demo for vehicle and face similiarity search
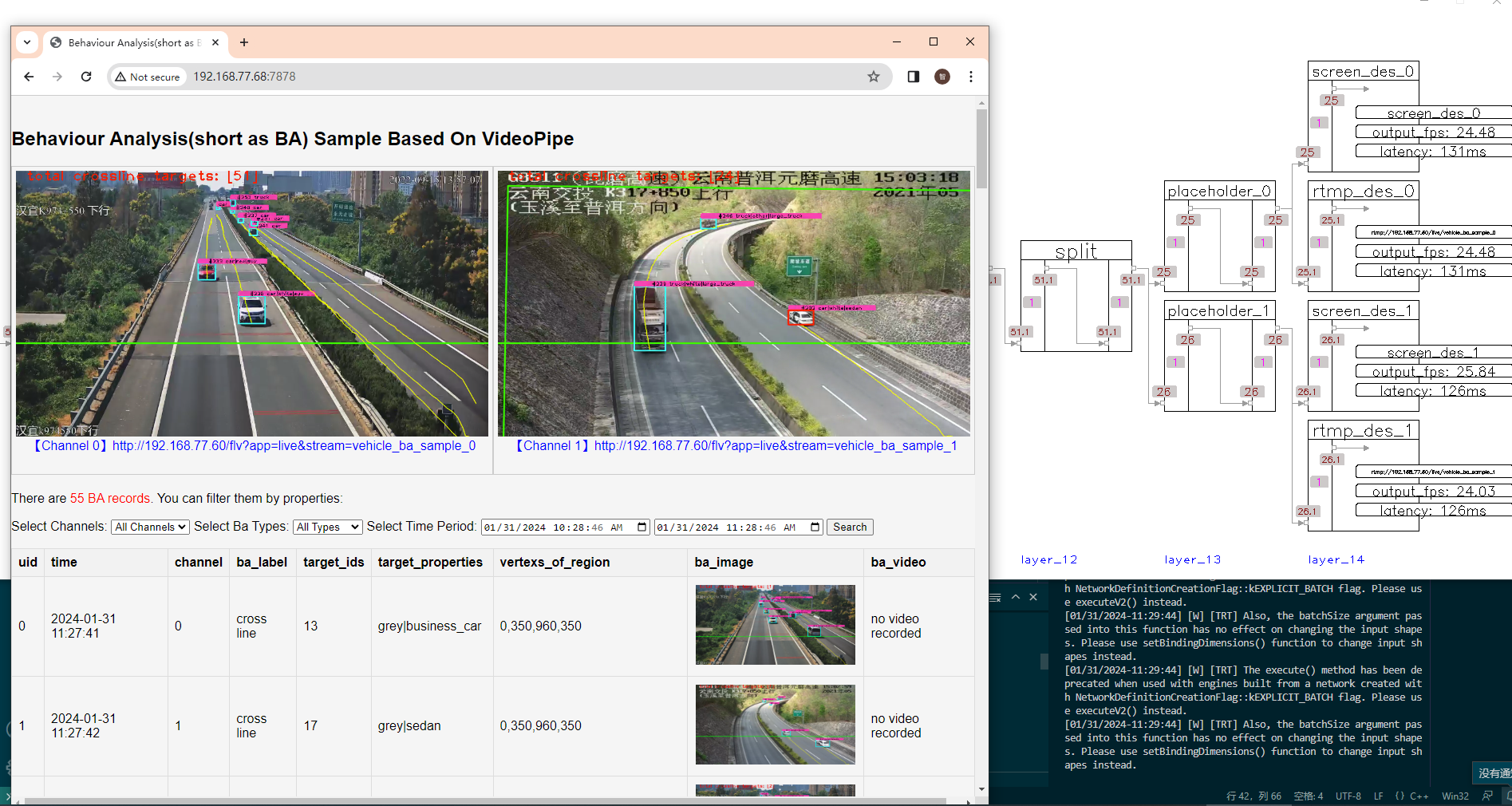
## behaviour analysis ##
flask demo for crossline and stop
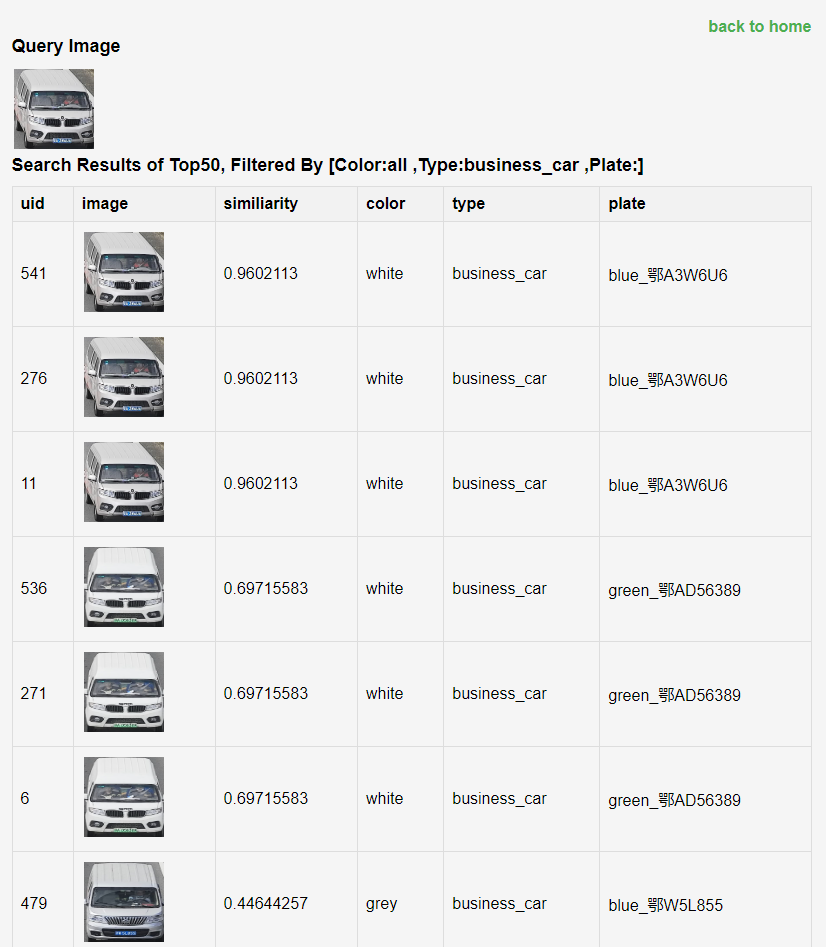
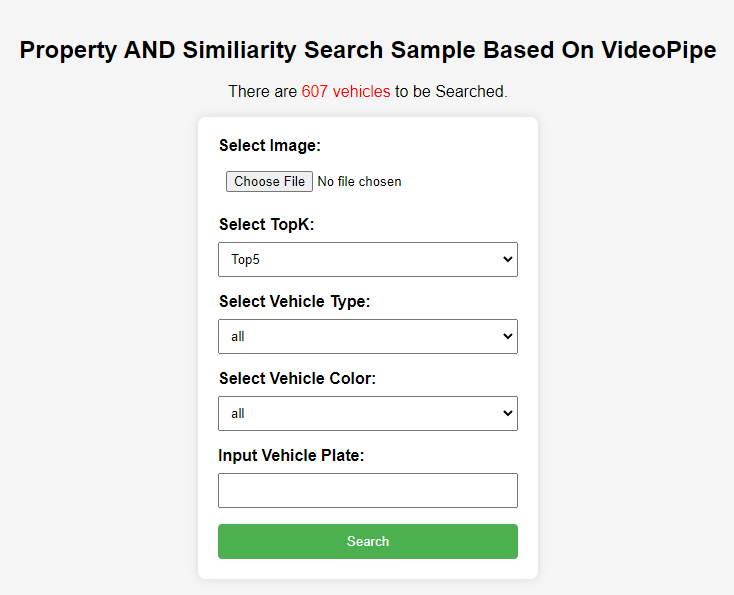
## property and similiarity search ##
flask demo for vehicle search by similiarity and properties
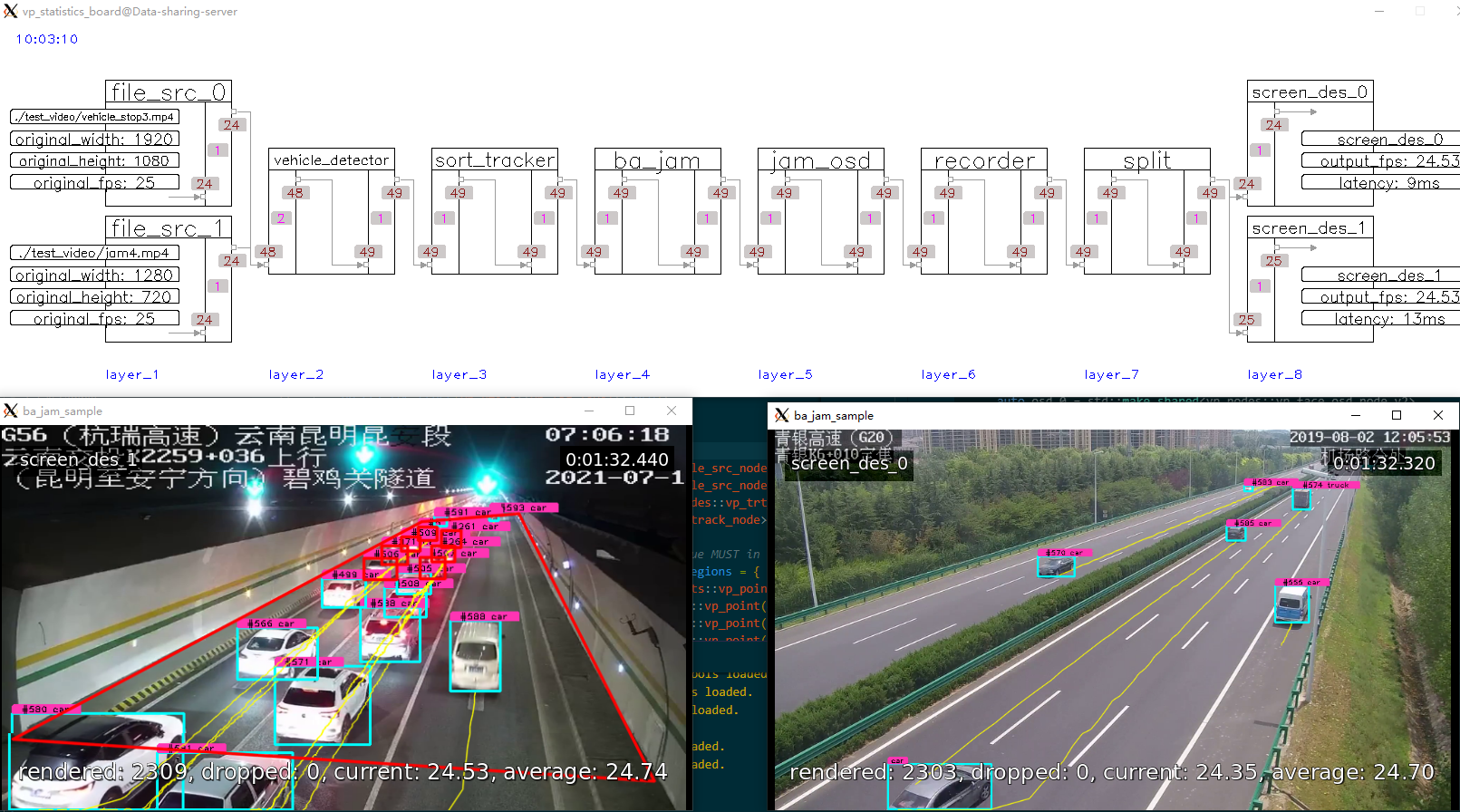
## ba_jam_sample ##
traffic jam behaviour analysis
## face recognize ##
flask demo for face recognize

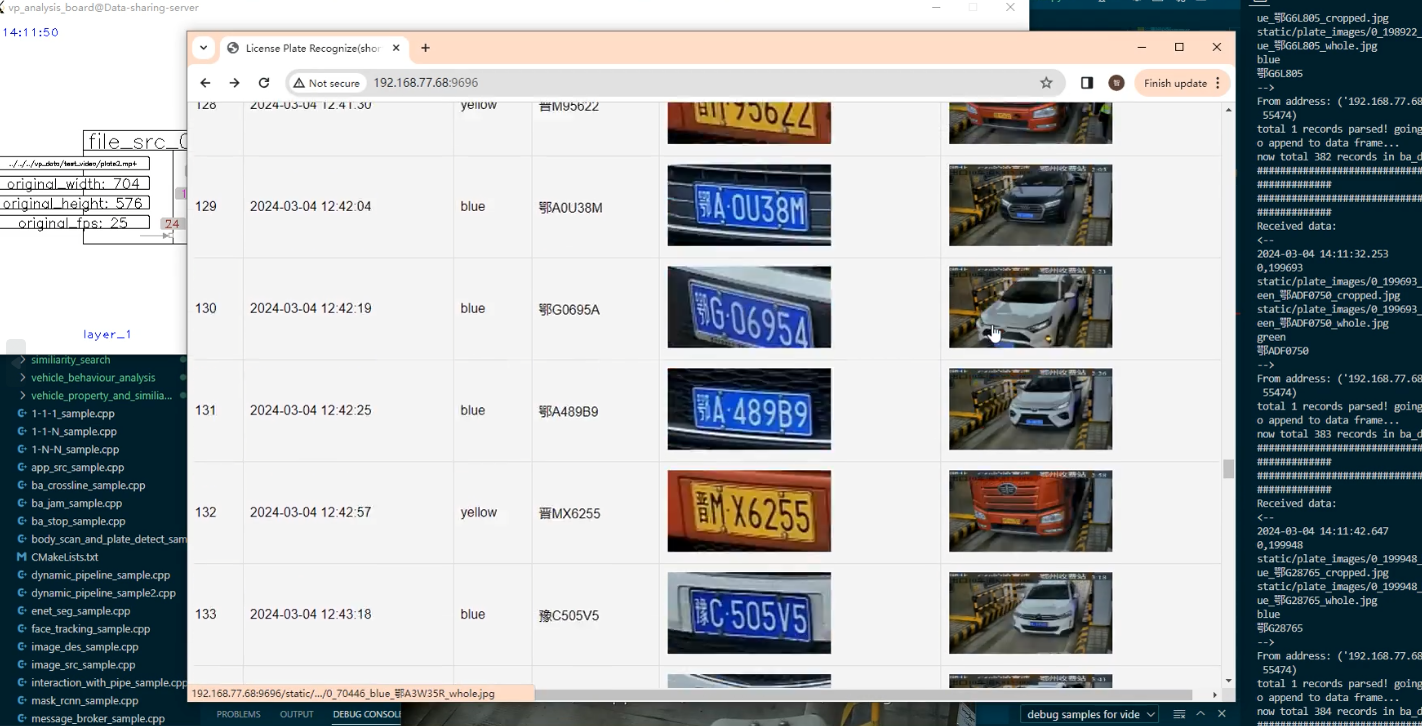
## license plate recognize ##
flask demo for license plate recognize
[for more samples](../SAMPLES.md)